
筋電義手
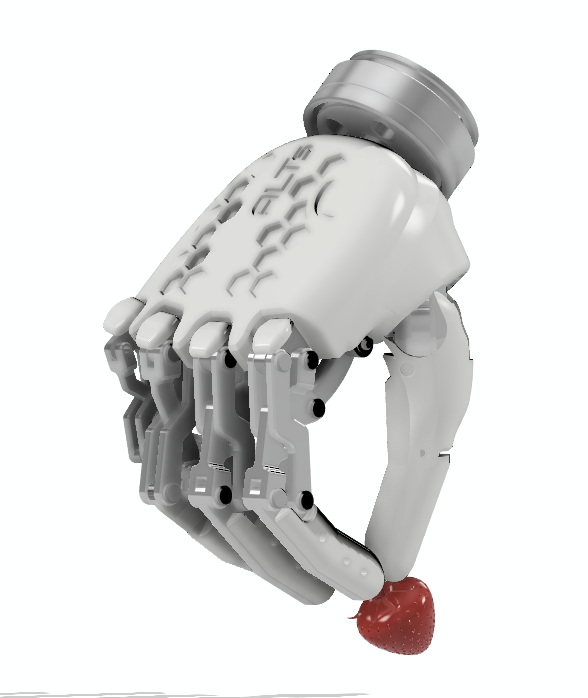
多自由度型 筋電義手
HuxleyHand™(ハクスリーハンド)
ALTsのコンセプトに沿って製作した試作機 HuxleyHandⅠと
人間の手により近い丸みを持たせた多自由度型ハンドユニット HuxleyHandⅡ
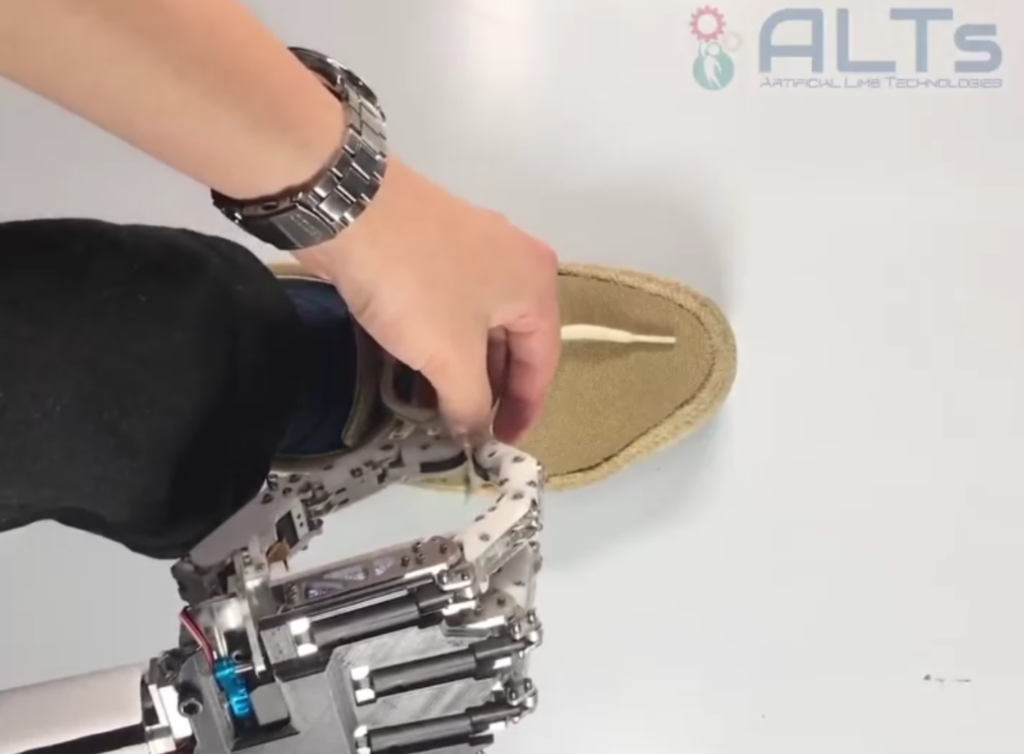
軽量型 筋電義手用ハンドユニット
AlternaHand™(オルタナハンド)

シンプルな構造ながら「つまむ・つかむ・にぎる」という3種の動作ができる軽量型ハンドユニット
義手用センサー
次世代筋電センサ MyoScan™
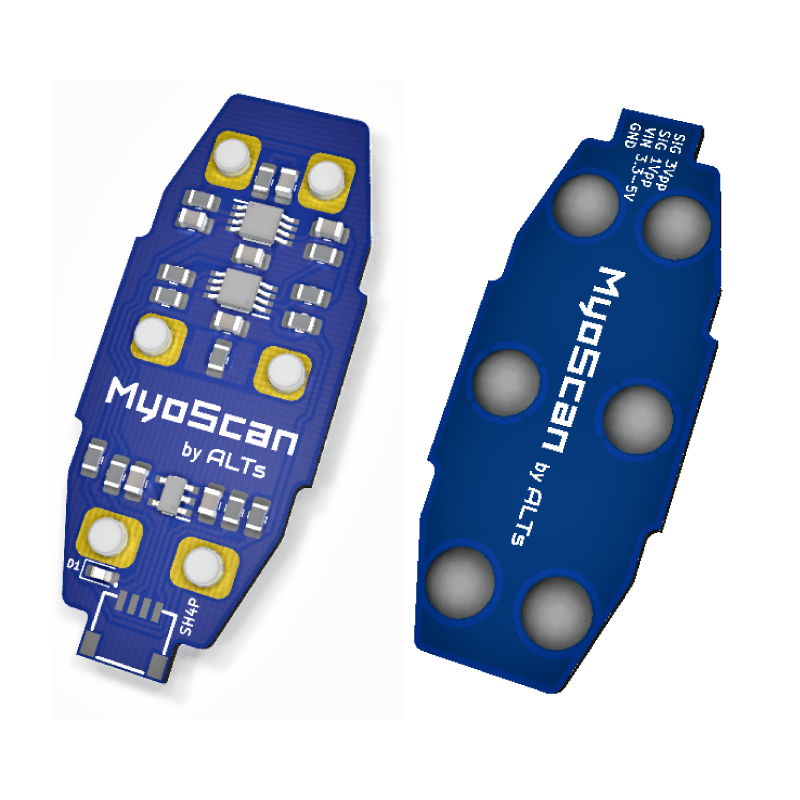
義手用筋電センサーのノウハウを応用して独自開発した、高精度な筋電情報を読み取れる汎用乾式筋電センサー
イヤホン型 義手コントローラ ChewingScan™


イヤホンのように装着するだけで電動義手の操作が可能となる耳掛け型センサー
生体センシング
平衡機能計 VisibleMat
厚さ3mmの板型デバイスに乗るだけで足裏の圧力分布を高精度に測定できる平衡機能計